
日本研发新技术 帮助自动驾驶车辆识别150米外的交通灯
随着自动驾驶汽车的不断发展,此类车辆必须配备能够与现有基础设施协调工作的系统,并需要能够处理复杂的城市景观。例如,处理不同形状、大小和安装位置的交通灯;多种城市标志色;指示方向的箭头灯。为了让自动驾驶汽车安全地运行,就必须让其能够在很短的时间内、识别出远处的此类物体,进行理解,并做出相应的反应。

(图片来源:金泽大学)
为此,据外媒报道,日本金泽大学(Kanazawa University)的研究人员就研发出一种新方法,可以可靠地帮助自动驾驶车辆处理城市中复杂的交通状况以及指示方向的不同箭头。该系统可以让车辆识别150米外的交通灯,并平稳自然地减速或调整驾驶操作。
在车辆、行人和各种物体都密集的城市地区,自动驾驶车辆面临着特殊的挑战,通常需要利用传感器来估计位置,利用能够提供静止物体精确位置的高精数字化地图来处理这一状况,因为这些技术可以帮助车辆估计自身所处位置以及周围的情况,从而更加智能地改变位置或车速。而在所有的状况中,成功地应对交通信号灯至关重要。
该研究的合著者Ryo Yanase表示:“为了让自动驾驶汽车安全地做出反应,必须能够在至少100米以外的地方看到交通信号灯。因此,我们创建了一种独特的算法,利用数字化地图来识别相关的交通信号灯,然后计算出必要的加速或减速操作。我们还发现了一种方法,可以让自动驾驶汽车比大多数人还善于辨别远处的箭头灯(指示方向)。”
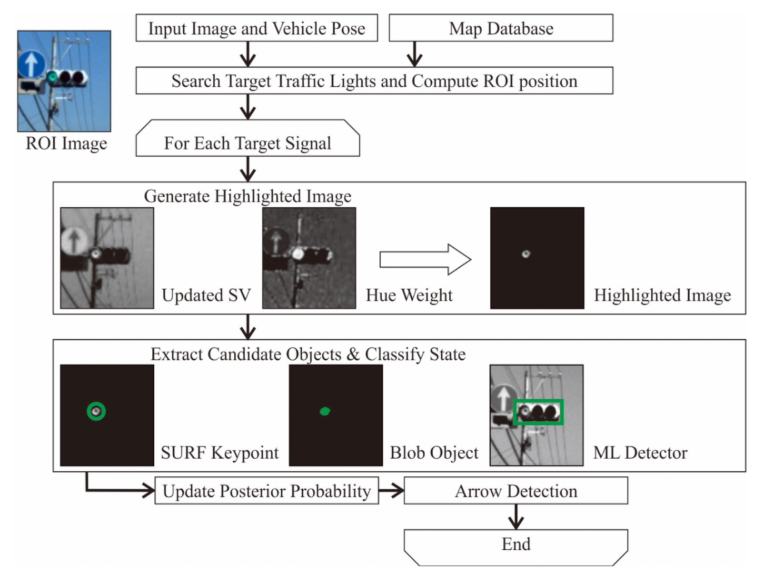
(图片来源:金泽大学)
利用一个高分辨率的镜头或长焦镜头在100米以外识别出交通信号灯似乎是一件比较简单的事情,但是当需要快速做出决策、宽广的视野变得至关重要时,可能处理时间会增加而视野被缩小。研究人员们打造的基于数字化地图的算法解决方案与传感器合作,能够在车辆靠近十字路口时,绘制车辆的位置以及包含信号灯的“感兴趣区域”。
该系统没有过多的资源,因此车辆的中央处理单元(CPU)可以实时进行处理。研究人员将该方法应用于各种城市驾驶条件下,看看其如何发挥作用。结果发现,即使相隔150米,该系统也能轻松识别交通信号灯,并相应地调整车速。
该研究的第一作者Keisuke Yoneda表示:“我们成功创造并验证了两项有价值的成果。首先,我们能够在远距离探测交通信号灯,并做出响应,几乎没有假阳性探测,而且仍可以管理CPU负载。另一方面,我们的系统可以识别小箭头类物体,甚至是像素小于10的物体。”
上述研究成果将有助于研发必要的技术,让自动驾驶车辆能够更安全地在充满其他车辆、行人和很多物体的繁忙城市地区行驶。

